Unidad de frecuencia variable


A unidad de frecuencia variable (VFD) (también se denomina variador de frecuencia ajustable, accionamiento de velocidad variable, Variador de velocidad, impulsión micro o inversor en coche) es un tipo de variadores de velocidad ajustable utilizado en electro-mechanical sistemas de control Motor de CA velocidad y esfuerzo de torsión mediante la variación de entrada del motor frecuencia y voltaje.[1][2][3][4]
VFDs se utilizan en aplicaciones que van desde pequeños electrodomésticos hasta el más grande de mina molino unidades y compresores. Sin embargo, aproximadamente 25% de la energía eléctrica del mundo es consumido por motores eléctricos en aplicaciones industriales[5] y 'VFDs global penetración en el mercado para todas las aplicaciones es todavía relativamente pequeñas. Esto pone de relieve las oportunidades de mejora de eficiencia energía especialmente significativo para instalaciones de VFD adaptadas y nuevas.
En las últimas cuatro décadas, electrónica de potencia tecnología ha reducido tamaño y costo de VFD y mejorar el rendimiento a través de los avances en dispositivos, topologías de impulsión, técnicas de simulación y control y control de hardware y software de conmutación del semiconductor.
VFDs están disponibles en un número de diferente baja y media tensión CA y topologías de DC-AC.
Contenido
- 1 Funcionamiento y descripción del sistema
- 1.1 Motor de CA
- 1.2 Controlador
- 1.3 Interfaz de operador
- 1.4 Unidad de operación
- 2 Beneficios
- 2.1 Ahorro de energía
- 2.2 Funcionamiento del control
- 3 Clasificaciones y tipos de VFD
- 3.1 Topologías genéricas
- 3.2 Plataformas de control
- 3.3 Características de par y la potencia de la carga
- 3.4 Potencias disponibles
- 3.5 Conduce por máquinas y topologías detalladas
- 4 Consideraciones de aplicación
- 4.1 Armónicos de línea AC
- 4.2 Efectos del plomo largo
- 4.3 Corrientes del motor
- 4.4 Frenado dinámico
- 4.5 Unidades regenerativas
- 5 Véase también
- 6 Notas
- 7 Referencias
Funcionamiento y descripción del sistema

Una unidad de frecuencia variable es un dispositivo utilizado en un sistema de impulsión consiste en los siguientes tres subsistemas principales: variador de velocidad del motor, principal controlador Asamblea e interfaz de operador en coche.[4][6]
Motor de CA
Motor eléctrico AC utilizado en un sistema de VFD es generalmente un trifásico motor de inducción. Algunos tipos de monofásico motores pueden usarse, pero motores trifásicos son generalmente preferidos. Varios tipos de motores síncronos ofrecen ventajas en algunas situaciones, pero tres fases motores de inducción son convenientes para la mayoría de los casos y suelen ser la opción más económica del motor. A menudo se utilizan motores diseñados para la operación de velocidad fija. Tensiones tensión elevada impuestas a los motores de inducción que le sean suministrados por VFDs requieren que tales motores ser diseñados para el propósito definido alimentados por inversor deber de conformidad con dichos requisitos como parte 31 de NEMA Estándar MG-1.[7]
Controlador
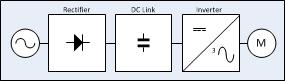
El controlador VFD es un de estado sólido sistema de conversión de energía electrónica que consta de tres subsistemas distintos: una rectificador convertidor de puente, un corriente directa Enlace (DC) y un inversor. Voltaje de fuente inversor (VSI) unidades (véase 'topologías genérico' sub sección abajo) son por lejos el más común tipo de unidades. La mayoría de las unidades son CA unidades en que se convertirán en entrada de línea de CA a la salida del inversor de la CA. Sin embargo, en algunas aplicaciones como bus DC común o solar aplicaciones, unidades configuradas como unidades de DC-AC. El convertidor más básico de rectificador para la impulsión VSI se configura como una corriente trifásica, seis-pulso, onda completa Puente del diodo. En una unidad de VSI, el enlace DC consiste en un condensador que alisa la salida del convertidor DC Ripple y proporciona una dura entrada al inversor. Este voltaje de C.C. filtrada es convertido en cuasi-sinusoidal Tensión de salida utilizando elementos de conmutación activos del variador. VSI unidades proporcionan mayor factor de potencia e inferior distorsión armónica que controlado por fase fuente de corriente inversor (CSI) y carga-conmutación Inversor (LCI) unidades (ver 'Topologías genérico' sub sección más abajo). El variador de velocidad también puede ser configurado como un convertidor de fase convertidor monofásico de entrada y salida del inversor trifásico.[8]
Controlador avances han explotado aumentos espectaculares en rangos de corriente y voltaje y frecuencia de conmutación de dispositivos de potencia de estado sólido en las últimas seis décadas. Introducido en 1983,[9] el transistor bipolar de puerta aislada (IGBT) tiene en los últimos dos decenios llegado a dominar VFDs como un inversor dispositivo de conmutación.[10][11][12]
En variableesfuerzo de torsión aplicaciones adaptadas para ajustarse voltios por Hertz (V/Hz) control de drive, motor de CA características requieren que la magnitud de la tensión del inversor de salida al motor para que coincida con el par de carga requerida en un lineal Relación de V/Hz. Por ejemplo, de 460 voltios, 60 Hz motores esta lineal V/Hz relación es 460/60 = 7.67 V/Hz. Aunque conveniente en amplia gama de aplicaciones, control V/Hz es óptima en aplicaciones de alto rendimiento que involucran a baja velocidad o exigente, regulación de la velocidad dinámica, posicionamiento y revertir los requisitos de carga. Algunas unidades de control V/Hz pueden funcionar también en cuadrática V/Hz modo o incluso se puede programar para traje especiales caminos multi-punto/Hz.[13][14]
Las otras dos unidades de control plataformas, control de vectores y control de par directo (DTC), ajustar la magnitud de la tensión del motor, ángulo de referencia y frecuencia[15] con el fin de controlar con precisión el flujo magnético y el par mecánico.
Aunque vector de espacio modulación por ancho de pulso (SVPWM) es cada vez más popular,[16] PWM sinusoidal (SPWM) es el más sencillo método usado para variar el voltaje del motor unidades (o actual) y la frecuencia. SPWM control (véase Fig. 1), cuasi-sinusoidal, pulso-ancho variable salida se construye desde las intersecciones de una señal de frecuencia portadora Saw-toothed con una señal sinusoidal modulación que es variable en frecuencia así como voltaje de funcionamiento (o actual).[10][17][18]
Operación de los motores por encima de la placa de identificación nominal velocidad (base) es posible, pero está limitada a las condiciones que no requieren más potencia de la placa del motor. Esto a veces se llama "debilitar el campo" y, para motores de corriente alterna, significa operar a menos de clasificado V/Hz y por encima de la velocidad nominal indicada. Imán permanente motores síncronos bastante limitado rango de velocidad debilitamiento de campo debido al constante del imán acoplamiento de flujo. Herida rotor Motores sincrónicos y motores de inducción tienen mucho más amplio rango de velocidad. Por ejemplo, una 100 hp, 460 V, 60 Hz, 1775 RPM motor de inducción (4 polos) suministrado con 460 V, 75 Hz (6.134 V/Hz), estaría limitado a 60/75 = par de 80% en una velocidad de 125% (2218,75 RPM) = 100% de potencia.[19] A velocidades más altas el par del motor de inducción tiene que ser más limitado debido a la reducción del esfuerzo de torsión disidente[a] del motor. Por lo tanto potencia nominal puede ser típicamente producido solamente para arriba a 130-150% de la velocidad nominal indicada. La herida del rotor Motores sincrónicos pueden ejecutarse a velocidades aún más altas. En unidades de laminación 200-300% de la velocidad base es de uso frecuente. La fuerza mecánica del rotor limita la velocidad máxima del motor.

Un incrustado microprocesador regula el funcionamiento general del controlador VFD. Básico programación del microprocesador se proporciona como usuario inaccesible firmware. Programación de usuario de pantalla, parámetros de bloque variable y función se proporciona para controlar, proteger y vigilar el VFD, equipo de motor y conducido.[10][20]
El variador básica puede configurarse para selectivamente incluir todos los componentes de alimentación opcional accesorios como sigue:
- Conectado aguas arriba del convertidor - interruptor de circuito o fusibles, aislamiento contactor, EMC filtro de línea, reactor, filtro pasivo
- Conectado al GPS DC- chopper de frenado, frenado resistor
- Conectados aguas abajo del inversor - reactor de salida, filtro de onda sinusoidal, filtro dV/dt.[b][22]
Interfaz de operador
La interfaz del operador proporciona un medio para que un operador iniciar y parar el motor y ajustar la velocidad de funcionamiento. Las funciones de control del operador adicionales pueden incluir revertir y conmutación entre el ajuste manual de la velocidad y control automático de un externo control de procesos señal. La interfaz del operario a menudo incluye un alfanumérico luces pantalla y/o indicación y metros para proporcionar información sobre el funcionamiento de la unidad. Una unidad de teclado y pantalla de interfaz de operador a menudo se encuentra en la parte frontal del controlador VFD como se muestra en la foto superior. La pantalla del teclado puede a menudo ser conectada mediante cable y montado en una corta distancia del controlador VFD. La mayoría también cuentan con entrada y salida Terminales (entrada-salida) para conectar pulsadores, interruptores y otros dispositivos de interfaz de operador o las señales de control. A comunicaciones en serie Puerto a menudo también está disponible para permitir el VFD para configurarse, ajustado, monitoreada y controlada mediante un ordenador.[10][23][24]
Unidad de operación

Refiriéndose a la carta de acompañamiento, aplicaciones en coche pueden ser categorizadas como single-cuadrante, dos cuadrantes o cuatro cuadrantes; los cuatro cuadrantes de la tabla se definen como sigue:[25][26][27]
- Cuadrante I - conducción o automovilismo,[28] adelante acelerando cuadrante con velocidad positiva y esfuerzo de torsión
- Cuadrante II - generando o frenado, frenando hacia adelante-desaceleración cuadrante con velocidad positiva y negativa par
- Cuadrante III - conducir o automovilismo, cuadrante aceleración inversa con velocidad negativa y esfuerzo de torsión
- Cuadrante IV - generando o frenado, cuadrante de frenado-desaceleración inversa con velocidad negativa y positiva par.
Mayoría de las aplicaciones implica cargas single-cuadrante opera en el cuadrante I, tales como en par variable (por ejemplo las bombas centrífugas o ventiladores) y cargas de cierta torsión constante (por ejemplo extrusoras).
Ciertos usos implican cargas de dos cuadrantes operando en el cuadrante I y II donde la velocidad es positiva pero los cambios de esfuerzo de torsión polaridad en caso de un ventilador de desaceleración más rápido que las pérdidas mecánicas naturales. Algunas fuentes definen dos cuadrantes unidades como cargas de funcionamiento en los cuadrantes I y III donde la velocidad y el esfuerzo de torsión es la misma polaridad (positiva o negativa) en ambas direcciones.
Ciertas aplicaciones de alto rendimiento implican cargas cuatro cuadrantes (cuadrantes I a IV) donde la velocidad y el esfuerzo de torsión pueden ser en cualquier dirección, tal como montacargas, elevadores y transportadores montañosos. Regeneración sólo puede ocurrir en autobús de enlace de la unidad DC cuando el inversor voltaje es menor magnitud que la parte trasera del motor-EMF y tensión del inversor y detrás-EMF son la misma polaridad.[29]
A partir de un motor, un VFD inicialmente aplica una baja frecuencia y el voltaje, evitando la alta corriente asociada directo en línea a partir. Después del comienzo del VFD, la frecuencia aplicada y la tensión aumenta a una velocidad controlada o intensificados para acelerar la carga. Este método comienza típicamente permite un motor desarrollar el 150% de su esfuerzo de torsión clasificado mientras que el VFD es dibujo menos del 50% de su corriente nominal de la red en el rango de baja velocidad. Un VFD puede ajustarse para producir una constante 150% a partir de par desde parado hasta velocidad máxima.[30] Sin embargo, refrigeración del motor se deteriora y puede resultar en sobrecalentamiento disminuye velocidad tal que prolongado funcionamiento del motor baja velocidad par significativo no es generalmente posible sin ventilación ventilador motorizado por separado.
Con un VFD, la secuencia de parada es justamente lo contrario como la secuencia de salida. La frecuencia y el voltaje aplicado al motor son ramped abajo a una velocidad controlada. Cuando la frecuencia acerca a cero, el motor se apagará. Una pequeña cantidad de par de frenado está disponible para ayudar a desacelerar la carga un poco más rápido que se detendría si el motor simplemente fueron apagado y permitió a la costa. Par de frenado adicional puede obtenerse mediante la adición de un circuito de frenado (resistor controlada por un transistor) para disipar la energía frenada. Con un rectificador de cuatro cuadrantes (activo-front-end), el VFD es capaz de frenar la carga por aplicar una torsión inversa e inyectar la energía a la línea de CA.
Beneficios
Ahorro de energía
Muchas aplicaciones de carga del motor de velocidad fija que son directas de energía de CA suministradas pueden ahorrar energía cuando funcionan a velocidad variable, por medio de VFD. Tal ahorro de energía es especialmente pronunciado en torque variable centrífugo ventilador y bomba de aplicaciones, donde el par y la potencia de las cargas varían con el cuadrado y cubo, respectivamente, de la velocidad. Este cambio da una reducción de energía grande en comparación a la operación de velocidad fija para una reducción relativamente pequeña en la velocidad. Por ejemplo, en el 63% de velocidad una carga del motor consume sólo el 25% de su energía a toda velocidad. Esto es de conformidad con leyes de afinidad que definen la relación entre varias variables de carga centrífuga.
En los Estados Unidos, se estima que 60-65% de la energía eléctrica se utiliza para suministrar motores, 75% de los cuales son par variable cargas ventilador, bomba y compresor.[31] Dieciocho por ciento de la energía utilizada en los motores 40 millones en los Estados Unidos podrían salvarse por las tecnologías de mejora de eficiencia energética como VFDs.[32][33]
Sólo 3% de la base instalada total de motores de corriente alterna se proporcionan con variadores.[34] Sin embargo, se estima que se adopta tecnología drive en tantos como 30-40% de todos los motores recién instalados.[35]
Un desglose de consumo de energía de la población global de las instalaciones del motor AC es como se muestra en la siguiente tabla:
| Pequeño | Propósito general - tamaño mediano | Grande | |
|---|---|---|---|
| Potencia | 10W - 750W | 0,75 kW - 375 kW | 375 kW - 10000 kW |
| Fase de tensión, | 1-Ph., < 240V | 3-pH, 200V a 1kV | 3-pH, 1kV a 20kV |
| % total de la energía del motor | 9% | 68% | 23% |
| Acción total | 2 billones | 230 millones | 0,6 millones |
Funcionamiento del control
Variadores se utilizan para propiciar un proceso y mejora de la calidad industrial y las aplicaciones comerciales aceleración, flujo, monitoreo, presión, velocidad, temperatura, tensión y torsión.[37]
Velocidad fija había operado cargas sujeto el motor a un elevado par de arranque y a los aumentos actuales que son hasta ocho veces la corriente a plena carga. Variadores en cambio gradualmente el motor a velocidad para disminuir el estrés mecánico y eléctrico, reduciendo el mantenimiento de funcionamiento de la rampa y reparacion los costos y alargando la vida útil del motor y el equipo conducido.
Variadores de velocidad también pueden ejecutar un motor en patrones especializados para minimizar aún más estrés mecánico y eléctrico. Por ejemplo, un patrón de curva S puede aplicarse a una aplicación de cinta transportadora de desaceleración suave y control de aceleración, que reduce la reacción que puede ocurrir cuando un transportador está acelerando o desacelerando.
Factores de rendimiento tiende a favorecer a usan de DC, en AC, unidades incluyen tales requisitos como operación continua a baja velocidad, operación de cuatro cuadrantes con regeneración, frecuente aceleración y desaceleración rutinas y la necesitan de motor a ser protegidos para el área peligrosa.[38] Las siguiente tabla compara AC y DC unidades según ciertos parámetros clave:[39][40][41]
| Tipo de impulsión | DC | CA VFD | CA VFD | CA VFD | CA VFD |
|---|---|---|---|---|---|
| Plataforma de control | Cepillo tipo DC | Control V/Hz | Control de vectores | Control de vectores | Control de vectores |
| Criterios de control | Circuito cerrado | Lazo abierto | Lazo abierto | Circuito cerrado | Lazo abierto w. HFI ^ |
| Motor | DC | IM | IM | IM | Interior PM |
| Regulación de la velocidad típica (%) | 0.01 | 1 | 0.5 | 0.01 | 0.02 |
| Gama de velocidad típica en el esfuerzo de torsión constante (%) | 0-100 | 10-100 | 3-100 | 0-100 | 0-100 |
| Velocidad mínima en el 100% de esfuerzo de torsión (% de la base) | Statu quo | 8% | 2% | Statu quo | Parada (200%) |
| Operación múltiple-motor recomendada | No | Sí | No | No | No |
| Protección contra fallas (fundida única o inherente a la unidad) | Fundido sólo | Inherente | Inherente | Inherente | Inherente |
| Mantenimiento | (Cepillos) | Baja | Baja | Baja | Baja |
| Dispositivo de realimentación | Tacómetro o codificador | N / A | N / A | Codificador | N / A |
^ Alta frecuencia inyección
Clasificaciones y tipos de VFD
Topologías genéricas


Variadores pueden clasificarse según las siguientes topologías genéricas:[c][42][43]
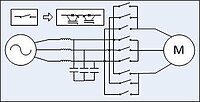
- Inversor de la fuente de voltaje (VSI) conducir topologías (ver imagen): en un VSI drive, la salida de CC de la diodo-convertidor de puente almacena energía en el autobús de condensador para proveer rigidez voltaje de entrada del inversor. La mayoría de las unidades es tipo VSI con salida de tensión PWM.[d]
- Topologías de impulsión del inversor de la fuente de corriente (CSI) (ver imagen): en un CSI drive, la salida de CC de la SCR-convertidor de puente almacena energía en serie-reactor conexión a la dura entrada de corriente al inversor de la fuente. Unidades de CSI pueden operarse con PWM o seis pasos de forma de onda salida.
- Topologías de impulsión del inversor de seis pasos (ver imagen):[e][44] Ahora pueden ser tipo CSI o VSI unidades en gran medida obsoletas, seis pasos y también se denominan unidades de inversor de voltaje variable, modulación de amplitud de pulso Unidades (PAM),[45] onda cuadrada las unidades o Helicóptero D.C. inversor unidades.[46] En una unidad de seis pasos, se alisa la salida de CC del convertidor de SCR-puente de conexión condensador autobús y serie-reactor de alimentación a través Par de Darlington o IGBT inversor cuasi-sinusoidal, seis pasos de voltaje o corriente a un motor de inducción.[47]
- Carga de topologías de impulsión del inversor conmutado (LCI):: En una unidad de LCI, un caso especial de la CSI, la salida de CC del convertidor SCR-puente almacena energía a través de circuito de CC enlace inductor para proveer rigidez cuasi-sinusoidal seis pasos corriente de salida del inversor de un segundo SCR-puente y una máquina síncrona sobreexcitada.
- Cicloconversor o matriz de topologías de convertidor (MC) (ver imagen): Cicloconvertidores y MCs Convertidores de CA que no tenga ningún vínculo intermedio de DC para almacenamiento de energía. Un cicloconversor funciona como una fuente de corriente trifásica mediante tres anti-paralelo conectado SCR-puentes en configuración de 6 pulsos, cada acción de fase cicloconversor selectivamente para convertir fijo línea frecuencia voltaje AC a un voltaje alterno a una frecuencia de carga variable. MC unidades están basados en el IGBT.
- Doblemente alimentado recuperación resbalón topologías de sistemas:: A doblemente alimentado resbalón sistema de recuperación de alimenta resbalón rectificado energía a un reactor de suavizado para suministrar energía a la red de alimentación de AC mediante un inversor, la velocidad del motor siendo controlado mediante el ajuste de la corriente continua.
Plataformas de control
Las unidades de la mayoría utilizan uno o más de las siguientes plataformas de control:[42][48]
- PWM V/Hz escalar control
- SW. control de campo-orientados (FOC) o control de vectores
- Control de par directo (DTC).
Características de par y la potencia de la carga
Variadores de frecuencia también se clasifican por las siguientes características de par y potencia de carga:
- Esfuerzo de torsión variable, tales como aplicaciones de ventilador, la bomba y del ventilador centrífugas
- Esfuerzo de torsión constante, tales como transportador y usos de la bomba de desplazamiento positivo
- Potencia constante, tales como máquina herramienta y usos de la tracción.
Potencias disponibles
VFDs están disponibles con voltaje y corrientes nominales cubriendo una amplia gama de motores de corriente alterna monofásicas o polifásicas. Unidades de baja tensión (LV) están diseñadas para operar a voltajes de salida iguales o inferior a 690 V. Mientras que el motor-aplicación LV unidades están disponibles en rangos de hasta el orden de los 5 o 6 MW,[49] unidades de media tensión (MV) a favor de consideraciones económicas típicamente con mucha menor potencia. Diferentes topologías de impulsión MV (véase tabla 2) se configuran según la clasificación de la tensión/corriente-combinación utilizada en dispositivos de conmutación variadores diferentes[50] tal que cualquier voltaje dado es mayor o igual a uno a las siguientes clasificaciones estándar Voltaje nominal del motor: generalmente tampoco 2.3/4.16 kV (60Hz) o 3.3/6.6 kV (50 Hz), con un tiristor fabricante clasificada para la conmutación de hasta 12 kV. En algunas aplicaciones un paso arriba transformador se coloca entre una unidad LV y una carga de motor MV. MV unidades se clasifican típicamente para aplicaciones de motor superiores entre unos 375 kW (500 hp) y 750 kW (1000 caballos de fuerza). MV unidades históricamente han requerido considerablemente más esfuerzo diseño aplicación que requiere para aplicaciones de impulsión del LV.[51][52] La potencia nominal de MV unidades puede llegar a los 100 MW, una amplia gama de topologías de unidad diferente estar involucrado para diferentes características, funcionamiento, requisitos de calidad y fiabilidad de alimentación.[53][54][55]
Conduce por máquinas y topologías detalladas
Por último sirve relacionar VFDs en términos de las siguientes dos clasificaciones:
- En términos de varias máquinas AC como se muestra en la tabla 1[56][57]
- En varios términos detallados Convertidor AC-AC topologías que se muestra en las tablas 2 y 3 siguientes.[42][43][54][55][58][59][60][61][62]
| Tabla 1: Unidades de máquinas | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
| Tabla 2: Unidades por detallado Convertidor AC-AC topologías | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
| Tabla 3: Diagramas de topología |
|---|





|
| Leyenda de las tablas 1 a 3 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Consideraciones de aplicación
Armónicos de línea AC
Nota de aclaración:.[f]
Tiempo armónicos en el PWM salida fácilmente puede ser filtrada por frecuencia portadora relacionados con filtro de inductancia para suministrar corrientes cerca-sinusoidales a la carga del motor,[17] rectificador de puente de diodos del VFD convierte Voltaje de línea de CA a la salida de voltaje DC por superponiendo no-lineal Media-fase actual pulsos así crear distorsión armónica de corriente, y por lo tanto, distorsión de tensión, de la CA de entrada de línea. Cuando las cargas de VFD son relativamente pequeñas en comparación con el sistema de alimentación grande, rígido en la empresa de energía eléctrica, los efectos de distorsión armónica VFD de la Red de CA a menudo puede estar dentro de límites aceptables. Además, en redes de baja tensión, armónicos causados por equipos monofásicos tales como computadoras y televisores son parcialmente anulados por armónicos puente trifásico diodo porque sus armónicos 5 y 7 están en counterphase.[63] Sin embargo, cuando la proporción de VFD y otra carga no lineal en comparación con carga total o de la carga no lineal en comparación con la rigidez en la alimentación de CA, o ambos, es relativamente bastante grande, la carga puede tener un impacto negativo en la onda de energía AC disponible para otros clientes de la compañía de energía en la misma red.
Cuando la tensión de la compañía eléctrica se distorsiona debido a armónicos, se aumentan las pérdidas en otras cargas tales como motores de corriente alterna normales de velocidad fija. Esto puede conducir a sobrecalentamiento y corta vida operativa. También subestación transformadores y condensadores de compensación se ven afectados negativamente. En particular, los condensadores pueden causar condiciones de resonancia que pueden magnificar inaceptables niveles de armónicos. Para limitar la distorsión de tensión, los dueños de la carga de VFD se requiera instalar equipos de filtrado para reducir la distorsión armónica por debajo de los límites aceptables. Por otra parte, la utilidad puede adoptar una solución mediante la instalación de equipos de filtrado propia en subestaciones afectadas por la gran cantidad de aparatos VFD. En las instalaciones de alta energía distorsión armónica puede reducirse mediante el suministro de puente rectificador multi-pulso VFDs de transformadores con devanados múltiples fase desplazada.[64]
También es posible reemplazar el diodo estándar-puente rectificador con un IGBT bidireccional conmutación puente dispositivo espejado del inversor estándar que utiliza IGBT salida dispositivo de conmutación del motor. Estos rectificadores son contemplados por diversas denominaciones incluyendo convertidor de entrada activa (AIC), rectificador activoUnidad de alimentación IGBT (ISU), activo front-end (AFE) u operación de cuatro cuadrantes. Con control PWM y reactor de entrada adecuado, corriente de línea de AC de AFE puede ser casi sinusoidal. AFE inherentemente regenera la energía en el modo de cuatro cuadrantes desde el lado de DC a la red de CA. Por lo tanto no es necesario ninguna resistencia de frenado y se mejora la eficiencia de la unidad si la unidad es con frecuencia necesaria para frenar el motor.
Dos otras técnicas de mitigación de armónicos explotan el uso de filtros pasivos o activos conectados a un bus común con por lo menos una carga de VFD rama en el autobús. Filtros pasivos implican el diseño de uno o más Low pass Filtro LC trampas, cada trampa sintonizada como sea necesario para una frecuencia armónica (5, 7, 11, 13,... kq + /-1, donde k = entero, q = número de pulso del convertidor).[65]
Es una práctica muy común para sus clientes o empresas de energía imponer límites de distorsión armónica basados en IEC o IEEE estándares. Por ejemplo, límites de 519 estándar IEEE en la conexión del cliente punto llamada para los armónicos de tensión máxima frecuencia individual ser no más del 3% de la fundamental y llamar para la tensión distorsión armónica total (THD) a no más del 5% para un sistema de suministro de potencia AC general.[66]
Efectos del plomo largo
[67][68][69][70]
La frecuencia portadora pulsada voltaje de la salida de un PWM VFD causas subida rápida veces en estos pulsos, los efectos de línea de transmisión que deben ser considerados. Desde la línea de transmisión impedancia del cable y el motor son diferentes, pulsos tienden a reflejar en el cable a los bornes del motor. La tensión resultante puede producir sobretensiones igual a dos veces la tensión del bus DC o hasta 3,1 veces el voltaje nominal para cables largos trayectos, alta tensión en las bobinas de cable y el motor y falla de aislamiento eventual. Tenga en cuenta que las normas para motores trifásicos nominal 230 V o menos adecuadamente proteger contra tales sobretensiones plomo largo. 460 o 575 V sistemas y inversores con 3ª generación tiempo de subida de 0.1 microsegundo IGBTs, la distancia máxima de cable recomendada entre motor y VFD es cerca de 50 m o 150 pies. Soluciones para sobretensiones provocadas por plomo largas longitudes incluyen minimizar cable distancia, bajando la frecuencia portadora, instalación de filtros dV/dt, usando deber inversor clasificado motores (que se están clasificado 600 V a soportar los trenes de pulso con tiempo de subida menos o igual a 0.1 microsegundo, de 1.600 V pico magnitud) e instalación del LCR pasabajas filtros senoidales.[71][72][73] En cuanto a reducción de la frecuencia portadora, tenga en cuenta que ruido audible se incrementa notablemente para frecuencias portadoras menos de 6 kHz y es más sensible a unos 3 kHz. Tenga en cuenta también que selección de óptima frecuencia PWM para variadores implica equilibrio de ruido, calor, tensión de aislamiento del motor, voltaje de modo común inducida por daños al cojinete del motor actual, buen funcionamiento del motor y otros factores. Más armónicos atenuación puede obtenerse utilizando un LCR pasabajas filtro senoidal o dV/dt.
Corrientes del motor
Unidades de PWM están intrínsecamente asociadas con alta frecuencia voltajes de modo común y corrientes que pueden causar problemas con los cojinetes del motor.[74] Cuando estas tensiones de alta frecuencia encuentran un camino a la tierra a través de un cojinete, la transferencia de metal o descarga eléctrica de mecanizado Chispas (EDM) se produce entre bola del cojinete y el cojinete de. Con el tiempo basado en EDM chispas provoca erosión en el cojinete que puede ser visto como un patrón estriado. En motores grandes, la capacitancia callejero de los bobinados ofrece senderos para corrientes de alta frecuencia que pasan a través de los extremos del eje del motor, llevando a un tipo de circulación de la corriente del cojinete. Pobre puesta a tierra de estatores del motor pueden conducir a tierra del eje del cojinete corrientes. Pequeños motores con equipo conducido mal conectado a tierra son susceptibles al cojinete de corrientes de alta frecuencia.[75]
Prevención de alta frecuencia teniendo daño actual utiliza tres enfoques: cableado y conexión a tierra buena practica, interrupción de corrientes, teniendo y filtrado o de amortiguación de las corrientes de modo común. Bien el cableado y las prácticas de puesta a tierra puede incluir uso del blindado, cable de alimentación de geometría simétrica a la instalación del motor, eje pinceles y grasa para rodamientos conductor de puesta a tierra de la fuente. Cojinete corrientes puede ser interrumpido por la instalación de rodamientos aislados y los motores de inducción apantallado electrostático especialmente diseñado. Filtrado y amortiguación de alta frecuencia del cojinete, o, en lugar de usando unidades estándar de nivel 2 de inversor, utilizando unidades de nivel 3 del inversor o convertidores de matriz.[75][76]
Desde picos actuales de alimentados por inversor de cables del motor alta frecuencia pueden interferir con otro cableado en las instalaciones, tales cables motor alimentados por inversor no deben ser sólo de blindados, geometría simétrica de diseño pero también se debe encamina al menos 50 cm lejos de los cables de señal.[77]
Frenado dinámico
Torsión generado por el disco hace que el motor de inducción en síncrono velocidad menos el resbalón. Si la carga más rápido que la velocidad síncrona conduce el motor, el motor actúa como un generador, conversión de energía mecánica a energía eléctrica. Este poder se devuelve al elemento de la unidad DC link (condensador o reactor). Un interruptor electrónico CC-link-conectado o frenado helicóptero DC controla la disipación de este poder como calor en un conjunto de resistores. Ventiladores de refrigeración pueden usarse para evitar el sobrecalentamiento de la resistencia.[27]
Frenado dinámico desperdicia energía frenado transformándola en calor. Por el contrario, regenerativas unidades recuperan energía frenado mediante la inyección de esta energía en la línea de CA. El costo de capital de unidades regenerativas es sin embargo relativamente alta.[78]
Unidades regenerativas


Variadores regenerativos tienen la capacidad de recuperar la energía frenada de una carga que se mueve más rápido que el designado la velocidad del motor (una reacondicionamiento de la carga) y volver al sistema de alimentación.
Cicloconversor, Scherbius, matriz, unidades de CSI y LCI inherentemente permiten retorno de la energía de la carga a la línea de voltaje-inversores requieren un convertidor adicional para retomar el suministro de energía.[80][81]
Regeneración sólo es útil en VFDs donde el valor de la energía recuperada es grande en comparación con el extra coste de un sistema regenerativo,[80] y si el sistema requiere frecuentes de frenado y de partida. Regenerativas VFDs son ampliamente utilizados donde se requiera control de velocidad de revisión de las cargas.[2][3][82]
Algunos ejemplos:
- Banda transportadora de unidades para la fabricación, que parar cada pocos minutos. Mientras, partes están ensambladas correctamente; una vez hecho esto, la banda se mueve.
- Una grúa, donde el motor elevador se detiene y con frecuencia se invierte, y frenado es necesario para disminuir la carga durante el descenso.
- Plug-in y los vehículos eléctricos híbridos de todos los tipos (ver imagen y Hybrid Synergy Drive).
Véase también
- Convertidor AC/AC
- Cambiador de frecuencia
- Compresor de aire de velocidad variable
- Bomba
Notas
- ^ NEMA Guide torsión disidente a) del Motor se define como 'El esfuerzo de torsión que produce un motor a velocidad cero cuando operan en un control' y, la rotura del Motor b) del esfuerzo de torsión como 'el par de avería de un motor es la potencia máxima que se desarrollará con tensión aplicada a frecuencia nominal de potencia de onda senoidal, sin una caída brusca en la velocidad.
- ^ El símbolo matemático dV/dt, definido como el derivado de la tensión de V con el tiempo t, proporciona una medida de velocidad de subida de tensión, el valor máximo admisible de los cuales expresa la capacidad de los condensadores, motores y otros elementos del circuito afectado para soportar la alta corriente o puntas de tensión debido a los cambios de tensión rápida; dV/dt se expresa generalmente en V/microsegundo.[21]
- ^ Una topología se define en términos de electrónica de potencia como la relación entre varios elementos de variadores.
- ^ El término suele utilizarse para decir VSI-PWM, que es engañosa ya que no sólo unidades de VSI son con salida PWM PWM.
- ^ El término seis pasos se refiere estrictamente a la alternativa de salida del inversor de onda PWM, algunas unidades se configura como combinados de seis pasos y opciones de PWM.
- ^ El tratamiento de armónicos que sigue está limitado por razones de simplificación a LV VSI-PWM unidades.
Referencias
- ^ Campbell, J. Sylvester (1987). Controles de estado sólido Motor AC. Nueva York: Marcel Dekker, Inc. pp. 79 – 189. ISBN0-8247-7728-X.
- ^ a b Jaeschke, Ralph L. (1978). Control de sistemas de transmisión de energía. Cleveland, OH: Penton/IPC. PP. 210-215.
- ^ a b Siskind, Charles S. (1963). Sistemas eléctricos de Control en la industria. Nueva York: McGraw-Hill, Inc. p. 224. ISBN0-07-057746-3.
- ^ a b Publicación de las normas NEMA (2007). Guía de aplicación para los sistemas de accionamiento de velocidad ajustable AC. Rosslyn, VA USA: Nacional Electrical Manufacturers Association (ahora la Asociación de equipos eléctricos y fabricantes de imágenes médicas). p. 4. 27 de marzo de 2008.
- ^ https://www05.ABB.com/global/Scot/scot201.NSF/veritydisplay/cd6d14453239c791c125750800332bd2/ $file/energy_efficiency_makes_difference_191108.pdf
- ^ Jaeschke, págs. 210-211
- ^ Guía de NEMA, p. 13
- ^ Campbell, págs. 79-83
- ^ Bose, Bimal K. (2006). Unidades de Motor y electrónica de potencia: avances y tendencias. Amsterdam: académico. p. 22. ISBN978-0-12-088405-6.
- ^ a b c d Bartos, Frank J. (Sep 1, 2004). "AC Drives estancia Vital para el siglo XXI". Ingeniería de control (Reed Business Information).
- ^ Eisenbrown, Robert E. (18 de mayo de 2008). "AC Drives, perspectiva histórica y futuro de la innovación y el crecimiento". Presentación inicial para el 25 aniversario del consorcio de energía electrónica (WEMPEC) y Wisconsin máquinas eléctricas. Universidad de Wisconsin, Madison, WI, USA: WEMPEC. págs. 6 – 10.
- ^ Jahn, Thomas M.; Owen, Edward L. (enero de 2001). "Unidades de CA ajustable-velocidad en el Milenio: Cómo llegamos aquí?". IEEE Transactions on Power Electronics (IEEE) 16 (1): 17 – 25. Doi:10.1109/63.903985.
- ^ "Fundamentos de variadores". p. hardware-parte 2: diapositiva 2 de 9. 18 de abril de 2012.
- ^ Bose, Bimal K. (1980). Sistemas de impulsión de velocidad ajustable AC. Nueva York: IEEE Press. ISBN0-87942-146-0.
- ^ Yano, Masao et al. "Historia de la electrónica de potencia para las impulsiones del Motor en Japón". p. 13. 18 de abril de 2012.
- ^ Bose, Bimal K. (2011). "Panorama de la energía y el impacto en electrónica de potencia en el siglo XXI". PEIA 2011 - Taller de electrónica de potencia para aplicaciones industriales y la conversión de energía renovable. Doha, Qatar. p. 12. 08 de febrero de 2012.
- ^ a b Bose (2006), p. 183
- ^ Campbell, pp. 82-85
- ^ Bose (1980), p. 3
- ^ Conceptos básicos de AC Drives, p. programación: diapositiva 3 de 7
- ^ "La película condensadores - breve definición de los términos". p. 2. 22 de mayo de 2012.
- ^ Conceptos básicos de AC Drives, p. Hardware - parte 2: diapositiva 7 de 9
- ^ Cleaveland, Peter (01 de noviembre de 2007). "Impulsa la velocidad ajustable de la CA". Ingeniería de control (Reed Business Information).
- ^ Campbell, págs. 107-129
- ^ "Guía técnica nº 8 - frenado eléctrico". 20 de abril de 2012.
- ^ "Regeneración de energía". 20 de abril de 2012.
- ^ a b Conceptos básicos de AC Drives, pp. Hardware - parte 1: 9-10 de 11 se desliza
- ^ Regeneración de la energía, diapositiva 3
- ^ Regeneración de la energía, diapositiva 6
- ^ Campbell, pp. 95-102
- ^ Bose, Bimal K. (junio de 2009). "El pasado, presente y futuro de la electrónica de potencia". Revista electrónica industrial, IEEE 3 (2): 9. Doi:10.1109/MIE.2009.932709.
- ^ Lanza, Mike. "Unidades de velocidad ajustable: incrementar la eficiencia energética". ChemicalProcessing.com. 27 de enero de 2012.
- ^ Bose, B. K. (febrero de 2009). Electrónica de potencia y motores recientes avances y perspectiva. IEEE Transactions on Industrial Electronics 56 (2): 581-588. Doi:10.1109/TIE.2008.2002726.
- ^ "Guía para variadores de velocidad - guía técnica nº 4". 27 de enero de 2012.
- ^ Lendenmann, Heinz et al. "Automovilismo adelante". 18 de abril de 2012.
- ^ Waide, Paul; Brunner, Conrad U. (2011). "Oportunidades de política de eficiencia energética para sistemas de accionamiento por Motor eléctrico". Agencia Internacional de energía. 27 de enero de 2012.
- ^ Conceptos básicos de variadores, p. Resumen: diapositiva 5 de 6
- ^ ¿"Unidades de DC o AC? Una guía para los usuarios de velocidad Variable unidades (VDV) ". p. 11. 22 de marzo de 2012.
- ^ "Velocidad Variable AC y DC impulsa la aplicación consideraciones". p. 2. 22 de marzo de 2012.
- ^ Drury, Bill (2009). Las unidades técnicas de Control y controles manual (2ª ed.). Stevenage, Herts, Reino Unido: Institución de ingeniería y tecnología. p. 474. ISBN978-1-84919-101-2.
- ^ Kang, Jun. "Impulsión del Motor del imán permanente de propósito general sin Sensor de posición y velocidad". 7 Sep 2012.
- ^ a b c Morris, Ewan; Armitage, David. "Una guía para variadores de velocidad estándar de media tensión, Part 2". págs. 7-13. 16 de marzo de 2012.
- ^ a b Paes, Richard (junio de 2011). "Tener una visión general de la velocidad ajustable de media tensión AC unidades y IEEE Std 1566 – norma para el Performance de velocidad ajustable AC unidades nominal 375 kW y más grande". Conjunto potencia aplicaciones industriales sociedad sociedad seminario técnico de ingeniería (Capítulo del sur de Alberta de IEEE): 1 – 78.
- ^ McMurray, William (abril de 1988). "Topología del circuito electrónico de la energía". Actas de la IEEE 76 (4): 428-437. Doi:10.1109/5.4428.
- ^ Carrow, Robert S. (2000). Referencia técnica de electricista: variadores de frecuencia. Albany, NY: Delmar Thomson Learning. p. 51. ISBN0-7668-1923-X.
- ^ Drury, p. 6
- ^ Sandy, Williams; Baillie, Alastair; Shipp, David (2003). Comprensión de comunicaciones interventriculares con ESPs - una lista práctica. Sociedad de ingenieros de petróleo.
- ^ Drury, págs. 6-9
- ^ ACS800 Catálogo - unidades sencillas 0,55 a 5600 kW. 19 de julio de 2009.
- ^ Wu, Bin (2005). "Convertidores de alta potencia y variadores". IEEE PES. diapositiva p. 22. 03 de febrero de 2012.
- ^ Bartos, Frank J. (01 de febrero de 2000). "Media tensión AC Drives cobertizo imagen personalizada". Ingeniería de control (Reed Business Information).
- ^ Lockley, Bill; Madera, Barry, Paes, Richard, DeWinter, Frank (enero – febrero 2008). "1566 estándar para manos Familiar (ONU)". Revista de aplicaciones industria IEEE 14 (1): 21 – 28. Doi:10.1109/MIA.2007.909800.
- ^ Wu, diapositiva 159
- ^ a b Klug, Rolf-Dieter; Klaassen, Norbert (2005). "Alta potencia media tensión Drives - innovaciones, portafolio, tendencias". Conferencia Europea sobre electrónica de potencia y aplicaciones. Doi:10.1109/EPE.2005.219669.
- ^ a b "MV topologías comparaciones y características y beneficios". 03 de febrero de 2012.
- ^ Bose (2006) pp. capítulo 6 – 8, especialmente págs. 328, 397, 481
- ^ "Velocidad variable de bombeo, una guía para aplicaciones exitosas, Resumen Ejecutivo". USDOE - Europump - Instituto hidráulico. Mayo de 2004. p. 9, higo. ES-7. 29 de enero de 2012.
- ^ Wu, Slide 159
- ^ Rashid, Muhammad H., (Ed.) (2006). Manual de electrónica de potencia: Dispositivos, circuitos y aplicaciones (2ª ed.). Burlington, MA: académico. p. 903. ISBN978-0-12-088479-7.
- ^ Rodríguez, J.; Lai Jih-Sheng, Fang Zheng Peng, (2002). "Los inversores multinivel: un estudio de topologías, controles y aplicaciones". IEEE Transactions on Industrial Electronics 49 (4): 724 – 738. Doi:10.1109/TIE.2002.801052.
- ^ Ikonen, Mika et al (2005). Comparación de convertidor de nivel dos y tres niveles en la aplicación de energía eólica. Lappeenranta University of Technology.
- ^ Kouro, Samir; Rodríguez, José; Wu, Bin; Bernet, Steffen; Pérez, Marcelo (julio – agosto 2012). "El futuro de la industria de alimentación: topologías de alta potencia ajustable velocidad de la unidad". Revista de aplicaciones industria IEEE 18 (4): 26-39. Doi:10.1109/MIAS.2012.2192231.
- ^ Janssen, Hansen; Neilsen, Peter; Blaabjerg, Frede (Ene-Dic 2000). "Cancelación armónica mediante la mezcla de cargas no lineales monofásicas y trifásicos". IEEE trans. en aplicaciones de la industria 36 (1).
- ^ Guía de armónicos con variadores - guía técnica nº 6. 17 de mayo de 2002. 29 de julio de 2009.
- ^ IEEE Std 519 - IEEE recomienda prácticas y requisitos para el Control de armónico en sistemas eléctricos. IEEE. 1992. Doi:10.1109/IEEESTD.1993.114370.
- ^ IEEE 519, pp. 69-70
- ^ Skibinski, Gary; Breit, Stephen (2004). "Línea y carga amistoso Drive soluciones para aplicaciones de Cable largo en eléctrico sumergible bomba de aplicaciones". Conferencia Técnica quincuagésimo primer anual petróleo de conferencia e industria química (IEEE): 269-278. Doi:10.1109/PCICON.2004.1352810.
- ^ "La aplicación informe largo Drive/Motor conduce". 14 de febrero de 2012.
- ^ Malfait, A.; Reekman, R.; Belmans, R. (1994). "Las pérdidas en unidades de Motor de inducción de velocidad Variable y ruido audible: influencia de la frecuencia de conmutación y del diseño de la jaula de ardilla". 29 congresos anuales de la industria IEEE aplicaciones sociedad:: 693-700.
- ^ "¿Quién se preocupa por la frecuencia portadora?". 15 de febrero de 2012.
- ^ Skibinski, 274 p.
- ^ Novak, Peter (01 de mayo de 2009). "Los fundamentos de las unidades de frecuencia Variable". EC & M. 18 de abril de 2012.
- ^ Finlayson, P.T. (enero – febrero 1998). "Salida de filtros para unidades de PWM con motores de inducción". Industria IEEE aplicaciones Mazagine 4 (1): 46-52. Doi:10.1109/2943.644886.
- ^ Yung, Chuck (2007). "No coinciden los cojinetes y la electricidad". PlantServices.com [planta servicios] (Itasca, Illinois: PtmanMedia): págs. 1 – 2.
- ^ a b Rodamientos corrientes en modernos sistemas de impulsión de AC - técnico guían Nº 5. 01 de diciembre de 1999. 14 de junio de 2011.
- ^ Swamy, M.; Kume, T. (mayo de 2008). Estado actual y una visión futurista de la tecnología de la impulsión del Motor. Actas del XI Congreso Internacional sobre optimización de equipos eléctricos y electrónicos, 2008 (OPTIM 2008). IEEE. págs. XIV – LVI, figura 16.
- ^ EMC compatible con instalación y configuración de un sistema de accionamiento - guía técnica nº 3. 11 de abril de 2008. 29 de julio de 2009.
- ^ Guía técnica nº 8, págs. 26-30
- ^ Olszewski, Mitch et al (2011). "Evaluación del 2010 Toyota Prius híbrido sistema de impulsión eléctrica". Oak Ridge National Laboratory. 26 de septiembre de 2012.
- ^ a b Dubey, Gopal K. (2001). Fundamentos de accionamientos eléctricos (2 ed.). Pangbourne: Alfa ciencia int. ISBN1-84265-083-1.
- ^ Rashid, p. 902, mesa 33.13
- ^ Campbell, pp. 70 – 190
| Wikimedia Commons tiene medios relacionados con Variadores de frecuencia. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||